Como modelar rotatórias – Parte 2
Nota Técnica #42
Dezembro 2019
Por Tessa Hayman

Antes de começar a codificar seu modelo, você pode configurar tipos de rotatória para minimizar a calibração local. Como os veículos percorrem rotatórias a velocidades significativamente inferiores ao limite de velocidade, você pode usar tipos de vias separadas para rotatórias de diferentes raios a fim de definir velocidades precisas.

Figura 1: Tipos de vias dentro da janela do projeto

Figura 2: Use uma polilinha para medir o tamanho da rotatória
Uma vez que o tipo de via é aplicado à rotatória, os parâmetros para todos os trechos de rotatória, bem como os movimentos de circulação e de saída serão, por padrão, definidos para aqueles do tipo de via.

Figura 3: O tipo de via desta rotatória está definido para uma rotatória de 40-60m
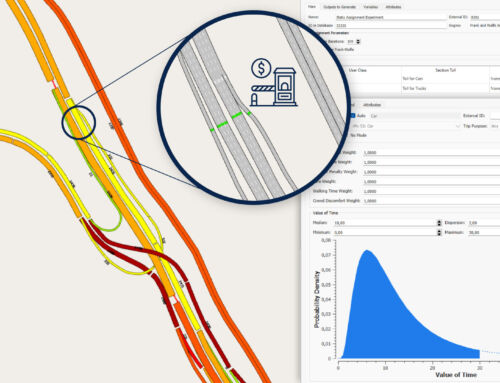
Se o modelo estiver em um país com uma rotatória estilo “choose-lane-on-entry” (ver parte 1), os parâmetros de distância-zona devem ser pelo menos a circunferência da rotatória; isto significa que um veículo que entra na rotatória está ciente da via de saída na entrada.
Estes parâmetros podem ser definidos dentro do tipo de via para cada tipo de rotatória:
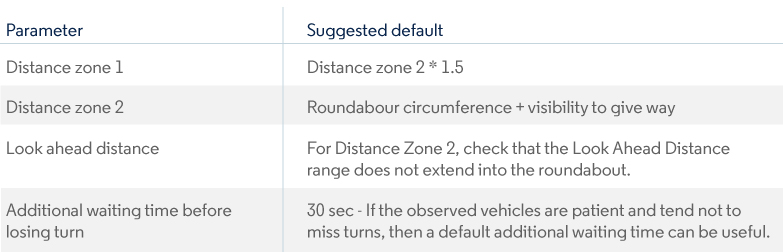

Figura 4: Cálculo das zonas de distância para uma rotatória
Localmente, você também pode desejar ajustar os parâmetros de visibilidade. A visibilidade é definida na seção de entrada para a rotatória e, portanto, não pode ser ajustada através do uso de um tipo de rotatória. Você também pode mudá-los globalmente com um script ou tipo de via adicional.
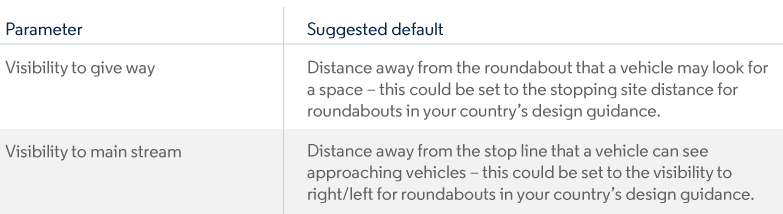

Figura 5: Padrões de visibilidade podem ser ajustados aos valores de projeto
Em situações de congestionamento na microsimulação, os parâmetros de distância da zona podem precisar ser mais longos a fim de minimizar os movimentos perdidos.
Parâmetros Micro
Se você estiver codificando uma rotatória do tipo choose-lane-on-entry, também pode ser útil aumentar a cooperação e a agressividade do trecho para incentivar mudanças de faixa na aproximação.
Parâmetros Meso
Como não há aceleração ou desaceleração na simulação mesoscópica, você pode precisar reduzir a velocidade na aproximação e nas seções de rotatória mais do que em micro; você pode fazer isso usando uma sobreposição de atributos.

Figura 6: Sobreposição de atributos para reduzir a velocidade em rotatórias na meso
- “Penalizar faixas compartilhadas” pode ser usado nas seções de entrada e circulação da rotatória para equilibrar o uso da faixa de circulação.
- A margem de segurança inicial e final é calculada na zona de conflito no micro. No meso, ela é calculada no início dos dois movimentos conflitantes, portanto, a margem de segurança deve ser maior do que na micro. Quanto maior for o movimento, maior será a margem de segurança.
Resultados
Como as rotatórias têm múltiplos movimentos, a contagem de seus movimentos não pode ser obtido diretamente. Há duas formas principais de coletar os movimentos das rotatórias:
- Usando um subcaminho: criar um subcaminho entre cada entrada e saída.
- Usando um supernó: selecione todos os nós dentro de um supernó e adicione-o a um supernó – Se você planeja fundir os nós de uma rotatória sinalizada, faça isso antes de criar o supernó.
Figura 7: use seleção extensiva para garantir que todos os nós da rotatória estejam selecionados.
Figura 8: clique com o botão direito em um nó e selecione Criar Supernó.
Figura 9: o supernó é gerado com todos os movimentos possíveis da interseção.
 Figura 7: Use uma seleção extensa para garantir que todos os nós dentro de uma rotatória sejam selecionados.
Figura 7: Use uma seleção extensa para garantir que todos os nós dentro de uma rotatória sejam selecionados. Figura 8: Clique com o botão direito do mouse em um nó e selecione Criar Supernó
Figura 8: Clique com o botão direito do mouse em um nó e selecione Criar Supernó Figura 9: O superno é então gerado com todos os movimentos possíveis dentro da interseção
Figura 9: O superno é então gerado com todos os movimentos possíveis dentro da interseção