
A última versão do Aimsun Next foi lançada em 25 de junho de 2020. Esta nova versão do Aimsun Next é chamada de Aimsun Next 20, pois estamos mudando para um esquema de versões baseado em datas.
O Aimsun Next 20 concentra-se na modelagem de pedestres, bicicletas e na interação entre passageiros e veículos de transporte público – este é um enorme passo em direção ao nosso objetivo final de modelagem individual e mobilidade multimodal.
Role a página para um guia rápido dos principais destaques do Aimsun Next 20, seguido de uma lista de todos os melhoramentos e novas funcionalidades.
Download Aimsun Next 20
Todos os utilizadores cuja Assinatura de Atualização de Software (SUS) é válida em ou após abril de 2020 podem fazer o download e instalar o Aimsun Next 20.
Se você quiser atualizar o seu SUS, entre em contato conosco agora em info@aimsun.com.
Destaques

Aimsun Next 20 é focado na modelagem de pessoas e como elas se movimentam pela cidade, particularmente caminhando, andando de bicicleta e usando o transporte público. Algumas das principais novidades são:
Aimsun Next 20 também inclui melhorias que lançamos anteriormente como funcionalidades Fast Track na versão 8.4:
- Modelos microscópicos para Controle de Cruzeiro Adaptativo (ACC) e Controle de Cruzeiro Adaptativo Cooperativo (CACC)
- Cálculo ponto a ponto do caminho A-Star em DUE
- Verificador de consistência do conjunto de dados reais
- Importação de dados de transporte público do OpenStreetMap
- Séries temporais de espaçamento e distanciamento para veículos individuais no micro
- Componentes da função para funções de custo dinâmico
- Funções de custo DTA definidas pelo usuário para as seções de saída
- Transição de semáforo vermelho-amarelo de vermelho para verde
- Mensagem SCATS Special Purpose Input (SPIP)
Todos os Novos Recursos no Aimsun Next 20
Simulador Microscópico

Simulador de Pedestres
Desenvolvemos um novo simulador de pedestres para ser usado dentro de uma simulação microscópica. Ele não substitui o Legion for Aimsun, mas os dois simuladores são complementares e servem a situações diferentes de uso.
Nosso novo simulador interno para pedestres Aimsun Next tem como alvo os engenheiros de mobilidade: ele é projetado para modelar o movimento de pedestres nas calçadas, a interação entre pedestres e tráfego nas faixas de pedestres e o processo de embarque e desembarque nas paradas de transporte público. O foco está na facilidade de uso, velocidade, suporte multi-plataforma e integração profunda com a plataforma Aimsun Next para ampliar o fluxo de trabalho de modelagem de mobilidade (por exemplo, a possibilidade de usar a Atribuição Dinâmica de Transporte para obter skims para o modelo de quatro etapas).

Legion for Aimsun tem como alvo os engenheiros de pedestres que trabalham com OpenBuildings Station Designer e o LEGION Simulator: ele é projetado para modelar a interação entre pedestres e o tráfego ao redor das instalações para pedestres, desde estações a locais esportivos, e as atividades dos pedestres dentro dessas instalações, incluindo o uso de escadas rolantes, elevadores, catracas, máquinas de venda automática e assim por diante.
Se você usou o Legion for Aimsun Base no passado (ou Lite ou Extra apenas devido à maior demanda de pedestres que eles suportam), é provável que você prefira usar o simulador de pedestres Aimsun Next agora. Por quê? Ele não apenas suporta tudo o que você podia fazer antes, mas também não tem limite no número de pedestres, ele também roda em Mac e Linux, é mais rápido e não requer uma licença separada. A modelagem também é mais rápida, pois você não precisa mais criar obstáculos ao redor dos trechos de via e dos prédios importados do OpenStreetMap, pois os pedestres reconhecem automaticamente esses objetos como espaço não acessível. E se você já tem modelos construídos para a Legion for Aimsun, a nova simulação de pedestres pode executá-los sem modificações.
Se você usou Legion for Aimsun Lite ou Extra para criar pontos de serviço, ou em combinação com Legion SpaceWorks para modelar o interior das instalações, Legion for Aimsun deve continuar sendo sua escolha, pois o novo simulador de pedestres Aimsun Next não suporta estas funcionalidades.
Atribuição Dinâmica de Transporte Público
A Atribuição Dinâmica de Transporte Público dá aos pedestres a opção de pegar o transporte público para chegar ao seu destino. A escolha é baseada na comparação do custo generalizado de caminhar até o destino com o custo generalizado de caminhar até uma parada de transporte público, esperar, pagar uma tarifa, viajar a bordo, fazer transferências e caminhar da última parada até o destino.

Você pode usar este recurso para construir modelos de pedestres mais abrangentes, ou para calcular skims dinâmicos para o transporte público que possam ser alimentados de volta às etapas de distribuição e divisão modal do modelo estratégico.
Microssimulação não baseada em faixas
Introduzimos um novo modelo microscópico car-following, capaz de modelar o movimento lateral e longitudinal dos veículos que não seguem as marcações da pista. Ele foi projetado para modelar o comportamento de veículos motorizados em regiões que não têm qualquer regra de faixa, ou de veículos de duas rodas, como bicicletas e motocicletas, em regiões onde é permitido viajar em paralelo na mesma faixa e infiltrar através de uma fila de veículos de quatro rodas.

Como o comportamento não baseado em faixas pode ser ativado por tipo de veículo e por seção, é possível modelar uma ampla gama de situações, desde faixas de bicicletas em que as bicicletas ultrapassam outras bicicletas que viajam na mesma direção, até faixas de retenção avançadas em um cruzamento sinalizado para motocicletas que passam entre veículos enfileirados. Pode-se até mesmo modelar um caso em que todo o tráfego ocupa toda a largura da via, independentemente das faixas marcadas, seja em um local específico ou em toda a rede.
Controle de Cruzeiro Adaptativo (ACC) e Controle de Cruzeiro Cooperativo Adaptativo (CACC) em simulações microscópicas
Implementamos os modelos de car-following desenvolvidos pelo grupo de pesquisa PATH na UC Berkeley para reproduzir os perfis de velocidade dos veículos equipados com ACC e CACC.
Melhoria do modelo de ultrapassagem de mão dupla
Use o novo e melhorado modelo de ultrapassagem de mão dupla para modelar veículos que ultrapassam outros veículos com uma velocidade muito baixa, mesmo quando há uma linha contínua. Isto reflete o fato de que na maioria dos países um veículo motorizado pode ultrapassar um ciclista, mesmo quando há uma linha contínua.
Comportamento de yellow box (caixa amarela)
Substituímos a velocidade da yellow box por uma caixa de seleção que habilita/desabilita o comportamento da yellow box para cada movimento.
Mostrar amarelo na transição vermelho-verde nos semáforos
Ao trocar um semáforo de vermelho para verde, você pode especificar um tempo intermediário amarelo.
Modelo de seleção de faixas para vias HOV em rodovias
Ao escolher a faixa a ser utilizada, os veículos agora avaliam as condições na faixa opcional mais próxima, mesmo que não seja adjacente à faixa atual. Isto, por exemplo, modela de forma mais realista o comportamento dos veículos HOV em uma rodovia de várias faixas com uma faixa HOV.
Séries temporais de espaçamento e distância para veículos individuais no micro
Novos atributos dinâmicos são coletados para veículos de simulação individual durante a simulação animada microscópica.
Modelagem estratégica
Loops experimentos 4-etapas
Agora você pode adicionar um novo Controlador de Loop ao diagrama de experimentos em quatro-etapas para quando você quiser iterar certas etapas como distribuição e divisão modal, até atingir o critério de parada.

Modelagem macroscópica
Melhorias no tempo de viagem do Atravessamento de TP
O cálculo da travessia estática agora calcula o horário do transporte público levando em conta o tempo de viagem desde o início da linha até o limite da sub-rede, avaliado de acordo com o valor cumulativo do custo do VDF/TPF/JDFs ou de um componente de função.
Modelagem dinâmica
Simulador Híbrido Macro/Meso
O Simulador Híbrido Macro/Meso é um novo simulador baseado em eventos que gera veículos individuais e os move aplicando os modelos comportamentais mesoscópicos dentro de áreas mesoscópicas, e estimando um tempo de viagem usando as funções VDF/TPF/JDF, ou um componente de função, fora dessas áreas. O Aimsun Next calcula os caminhos aplicando a Atribuição Dinâmica de Tráfego ( Escolha Estocástica de Rota ou Equilíbrio Dinâmico de Usuário) em todo o modelo.

Esta abordagem de modelagem permite ampliar o escopo de um modelo mesoscópico para capturar efeitos de redirecionamento externo sem comprometer demais o tempo de execução ou o esforço de calibração.
Critérios de convergência adicionais para experimentos DUE
Adicionamos critérios de convergência adicionais relacionados à estabilidade da solução de equilíbrio. Agora você pode parar as iterações quando o RGap estiver abaixo do limite definido para um determinado número de iterações consecutivas, e/ou quando a mudança no fluxo ou custo entre iterações estiver abaixo de um limite definido para pelo menos uma determinada porcentagem de todas as seções.
Funções de custo DTA nas seções de saída
Agora você pode selecionar as funções de custo DTA (K-initials, funções de custo inicial e dinâmico aplicadas à última seção antes de chegar a um centróide de destino.
Custos definidos pelo usuário para os movimentos em DTA
Agora você pode definir os custos definidos pelo usuário para os movimentos, não apenas para as seções. Desta forma, você pode penalizar manobras específicas.
Componentes de função para funções de custo dinâmico
Use os novos componentes de função para obter saídas extras de simulações dinâmicas de tráfego.
Melhorias no Gerenciamento de Tráfego
Agora você pode criar ações de gerenciamento de tráfego para modificar os principais parâmetros de comportamento de seções e curvas durante uma simulação micro, meso ou híbrida. Isto facilita a calibração de cenários onde o nível de congestionamento em um determinado local varia durante o período modelado e, portanto, os veículos podem mudar seu comportamento, por exemplo, em termos de cooperação de mudança de faixa ou de look-ahead.
Agora você pode aplicar uma ação de redução de velocidade nos movimentos. Isto pode ser usado, por exemplo, para definir diferentes velocidades de movimento para diferentes tipos de veículos.
Ajuste de Demanda
Cobertura mínima de seção para permitir um ponto de detecção
Você pode definir o Limiar de Cobertura de Pista do Detector para determinar a porcentagem de faixas em uma seção que um detector ou estação de detecção deve cobrir a fim de ser incluída no processo de ajuste. Isto afeta o Ajuste de OD Estático, Ajuste de Partida de OD Estático e Ajuste de OD Dinâmico. As versões anteriores usam um valor de hardcoded de 60%.
Critérios de parada para ajuste de OD estático
Agora o ajuste do OD estático pode parar as iterações quando a regressão linear entre volumes e contagens atribuídas atinge um alvo R^2 e uma inclinação do alvo. Nas versões anteriores, o número de iterações de ajuste era fixo e predefinido.
Melhorias no ajuste de OD dinâmico
O Ajuste de OD Dinâmico agora admite a elasticidade da demanda.
Você pode executar um Ajuste de OD Dinâmico em combinação com uma atribuição DUE, embora nós ainda iteremos manualmente entre uma atribuição DUE e um ajuste com uma atribuição one-shot que apenas executa um carregamento de rede nos caminhos de input DUE – desta forma você pode detectar bloqueios de rede mais cedo, parar o processo e calibrar o comportamento do veículo.
Referência para elasticidade e delimitação da demanda
O Ajuste de Partida de OD estático e o Ajuste de OD Dinâmico podem agora calcular elasticidade e limites de demanda em relação a um conjunto de matrizes que é diferente daquelas que estão sendo ajustadas. Ao usar a demanda antes do Ajuste de OD Estático como referência, você pode minimizar a modificação da demanda inicial em um processo que aplica o Ajuste de OD Estático, o Ajuste de Partida de OD Estático e o Ajuste de OD Dinâmico em seqüência.
Interfaces de Controle de Tráfego
STREAMS
Uma interface com a plataforma STREAMS do Sistema de Transporte Inteligente (ITS) da Transmax está disponível mediante solicitação. A interface pode ser usada para treinar os operadores do sistema, conectando-o a uma simulação microscópica. Note que o sistema STREAMS não pode funcionar mais rápido do que em tempo real, portanto, isto força a simulação a funcionar em tempo real.
Mensagem SCATS Special Purpose Input (SPIP)
Uma nova coluna na tabela de Detectores ajuda você a selecionar se o detector está configurado como SPIP.
Melhorias na Plataforma
Gerenciamento automático dos arquivos de projeto
O Aimsun Next agora organiza automaticamente os arquivos de qualquer novo projeto (documento do modelo, backgrounds, dados reais, rotas, saídas, etc.) em uma estrutura de pastas fixas para facilitar a criação de backups e entregas. Esta nova estrutura de pastas também se aplica aos tutoriais; após selecionar se deseja abrir a rede inicial ou final, selecione a pasta onde você deseja criar a estrutura de pastas do projeto e salve a rede do tutorial.
Path Assignment Plan object
Use the new Path Assignment Plan object to combine multiple Path Assignments, assigning an Initial Time and Duration to each item.
The many benefits include: using the paths calculated with multiple static assignments for different time periods within a single dynamic simulation; combining the paths of multiple DUEs in order to run a longer one-shot simulation; or running a simulation that just covers a portion of the period covered by a previously calculated path assignment.
Comparação de vetores
Agora, em adição a uma comparação matricial, você pode realizar uma comparação de Vetor de Centróide ou uma comparação de Vetor de Geração/Atração. Você também pode comparar os Vetores de Geração/Atração com matrizes OD.
Verificador de Consistência de Dados Reais
A ferramenta Verificador de Consistência do Conjunto de Dados Reais pode aplicar várias verificações de consistência baseadas no fluxo, velocidade e ocupação (se disponível) tanto para detectores quanto para estações.
Importadores
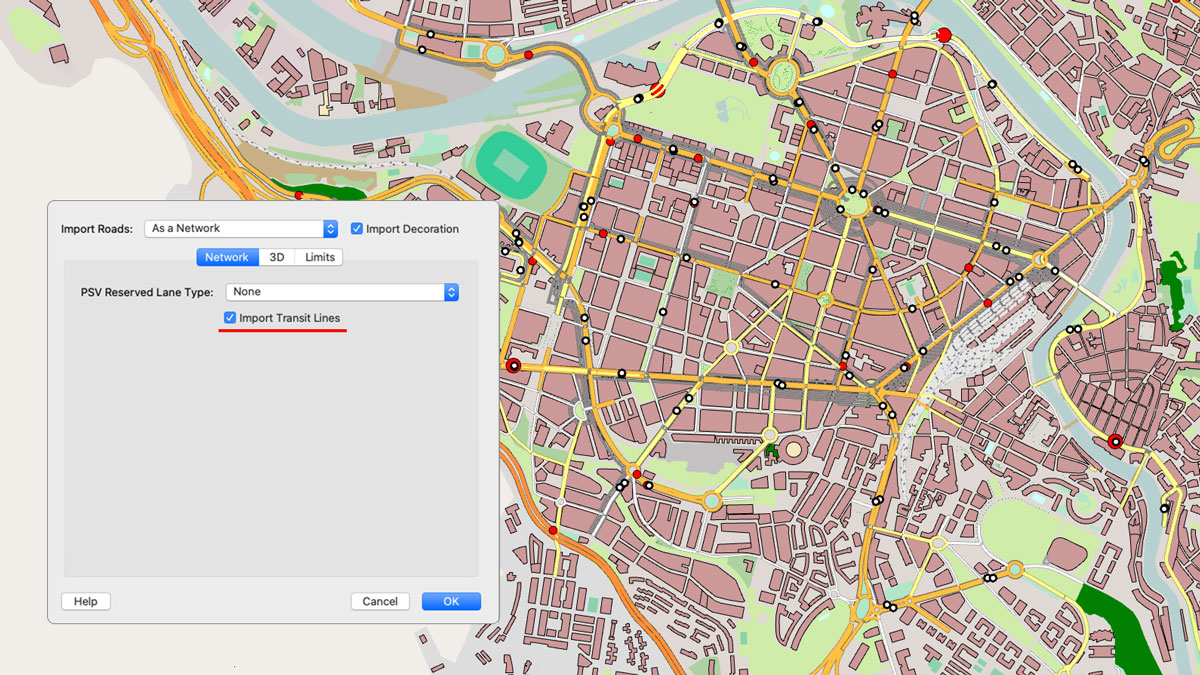
Importador de dados de transporte público OpenStreetMap
O importador OpenStreetMap agora importa Linhas de Transporte Público
Programação
APIs
As mudanças de API estão listadas em detalhes no manual, mas elas incluem:
- Funções relevantes para a gestão de tráfego
- Funções e atributos relevantes para a velocidade da yellow-box
- Atributos removidos do StaticInfVeh e StaticPTVeh
- Funções relacionadas com a entrada de veículos
- Três novos parâmetros que permitem o posicionamento de veículos 2D
- Funções relacionadas com os pedestres Legion
Scripting
O instalador padrão do Aimsun Next suporta o Python 3. Um instalador compatível com o Python 2 também está disponível sob solicitação para facilitar a transição.
Funcionalidades Descontinuadas
Carregamento de Rede Quasi-Dynamic
O Carregamento de Rede Quasi-Dynamic foi um pós-processamento de uma atribuição macro estática que calculava filas verticais com base nas capacidades de link.
Descontinuamos essa funcionalidade por não ser mais rápida que a meso e sofrer dos mesmos problemas que afetam os modelos macroscópicos não baseados em faixas, ou seja, a capacidade de um movimento não depende de fluxos conflitantes, e as filas causadas por um movimento bloqueiam todo o trecho da seção.
Se você precisar realizar uma atribuição com limitação de capacidade, use o simulador mesoscópico.




