

Atribuições dinâmicas
Para experimentos dinâmicos (macro-meso, meso-micro, meso e micro) as conexões não têm custo, mas existem diversos parâmetros que controlam como cada veículo escolhe entre múltiplas conexões de entrada e saída e como os caminhos entre elas são calculados e avaliados
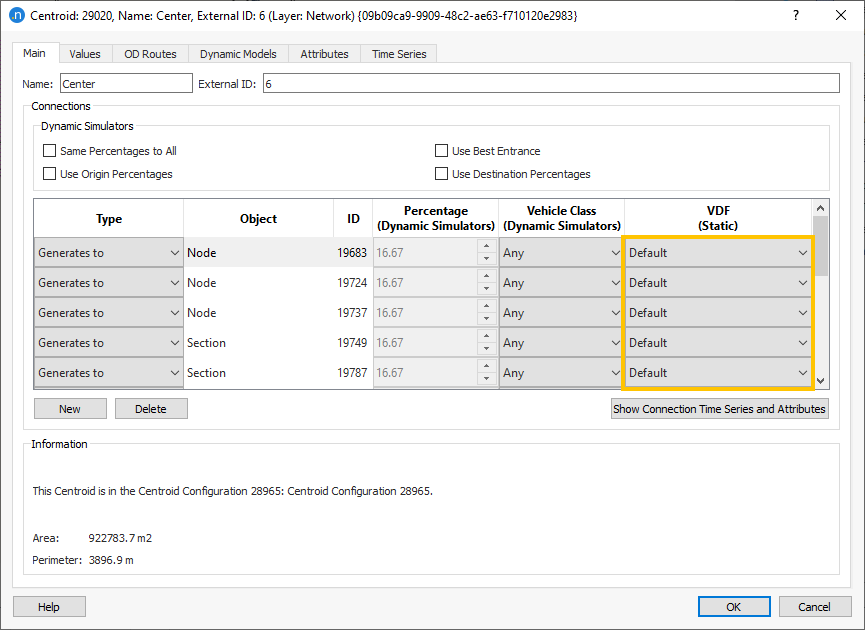
Estes são definidos nas propriedades do centróide:
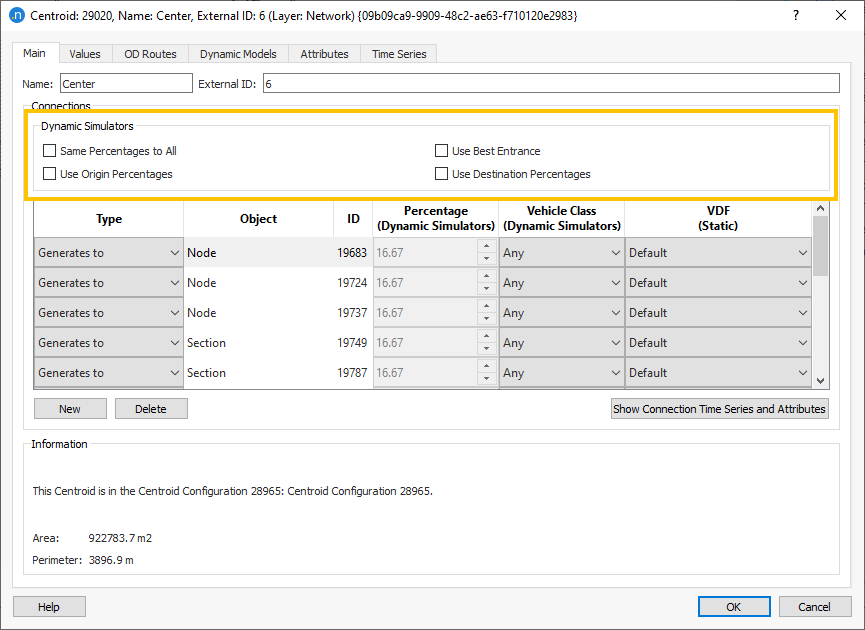
Se nenhuma caixa for marcada, os veículos escolhem uma conexão de acordo com o custo até o destino, calculado usando as funções de custo inicial e dinâmico. Em geral, isso significa que os veículos usam a(s) entrada(s) que os levará ao seu destino mais rapidamente e, portanto, essa deve ser a configuração padrão e preferencial.
| Modelo | SRC com opções padrão | SRC com melhor entrada de uso | DEVIDO | |||
|---|---|---|---|---|---|---|
| Etapa | lista de caminhos | Descrição | lista de caminhos | Descrição | lista de caminhos | Descrição |
| 1 |  |
No primeiro intervalo da simulação quente ou principal, calcule usando o ICF a árvore de caminho de menor custo. Quando houver várias conexões de entrada, a árvore fornecerá um caminho por conexão de entrada para o mesmo OD. Adicione tudo isso ao caminho definido. Com duas conexões de entrada, pode conter até dois caminhos. Se já houver vários caminhos, calcule a probabilidade de escolha aplicando a função de escolha discreta. |  |
No primeiro intervalo da simulação quente ou principal, calcule usando o ICF a árvore de caminho de menor custo. Adicione apenas o caminho de menor custo ao conjunto para todos os intervalos. Há um caminho no caminho definido. Atribua todos os veículos a esse caminho. | |
Na primeira iteração, calcule, usando o ICF, a árvore de caminho de menor custo. Adicione apenas o caminho de menor custo ao conjunto para todos os intervalos. Há um caminho no caminho definido. Atribua todos os veículos a esse caminho. Observe que o caminho é o mesmo para todos os intervalos. |
| 2 | 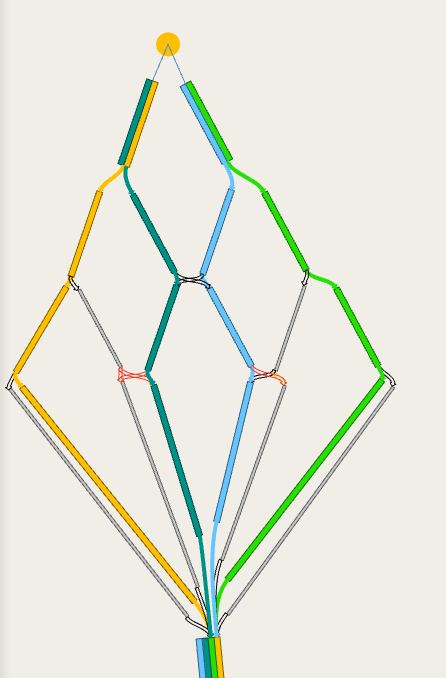 |
No próximo intervalo de custo, usando o DCF e os custos no final do intervalo anterior, calcule a árvore de caminho de menor custo. Quando houver várias conexões de entrada, a árvore fornecerá vários caminhos para o mesmo OD. Adicione tudo isso ao caminho definido. Com duas conexões de entrada, pode conter até quatro caminhos. Selecione no conjunto de caminhos os 3 caminhos com menor custo e calcule a probabilidade de escolha aplicando a função de escolha discreta. | |
No próximo intervalo de custo, usando o DCF e os custos no final do intervalo anterior, calcule a árvore de caminho de menor custo. Adicione apenas o caminho de menor custo ao conjunto. Existem agora (até) dois caminhos no caminho definido. Calcule a probabilidade de escolha aplicando a função de escolha discreta. | |
Na próxima iteração, para cada intervalo, calcule, usando o DCF e os custos ao final do mesmo intervalo da iteração anterior, a árvore de caminho de menor custo. Adicione apenas o caminho de menor custo ao conjunto. Existem agora (até) dois caminhos no conjunto de caminhos. Divida os veículos igualmente. |
| 3 | 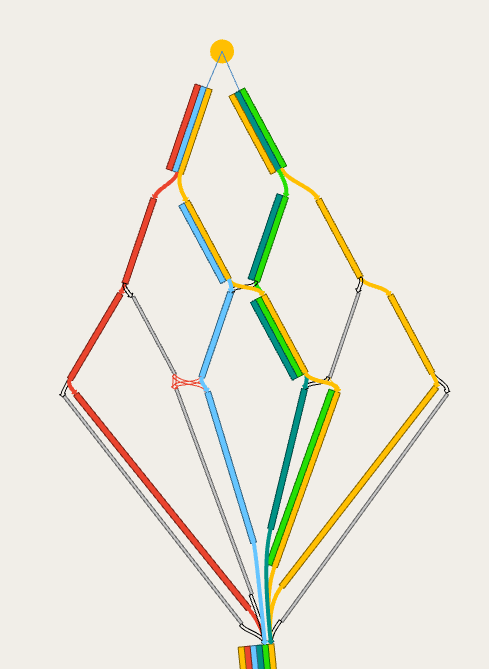 |
No próximo intervalo de custo, usando o DCF e os custos no final do intervalo anterior, calcule a árvore de caminho de menor custo. Quando houver várias conexões de entrada, a árvore fornecerá vários caminhos para o mesmo OD. Adicione tudo isso ao caminho definido. Com duas conexões de entrada, pode conter até seis caminhos. Selecione no conjunto de caminhos os 3 caminhos com menor custo e calcule a probabilidade de escolha aplicando a função de escolha discreta. | 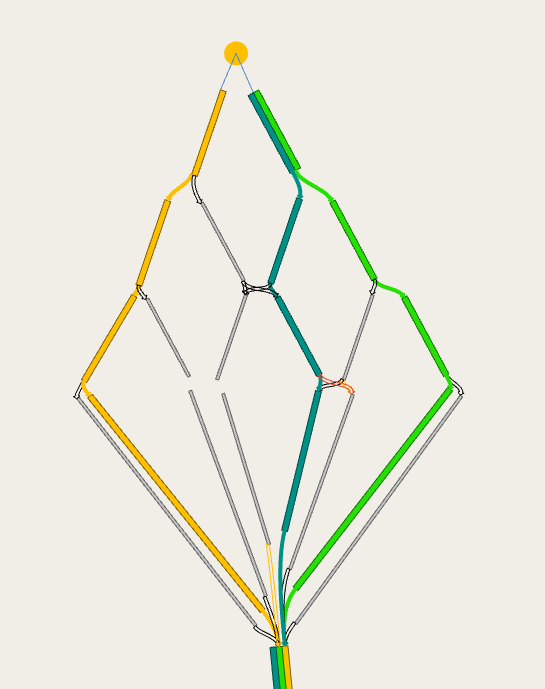 |
No próximo intervalo de custo, usando o DCF e os custos no final do intervalo anterior, calcule a árvore de caminho de menor custo. Adicione apenas o caminho de menor custo ao conjunto. Existem agora (até) três caminhos no caminho definido. Calcule a probabilidade de escolha aplicando a função de escolha discreta. | |
Na próxima iteração, para cada intervalo, calcule, usando o DCF e os custos ao final do mesmo intervalo da iteração anterior, a árvore de caminho de menor custo. Adicione apenas o caminho de menor custo ao conjunto. Existem agora (até) três caminhos no conjunto de caminhos. Divida os veículos igualmente. |
| 4 | 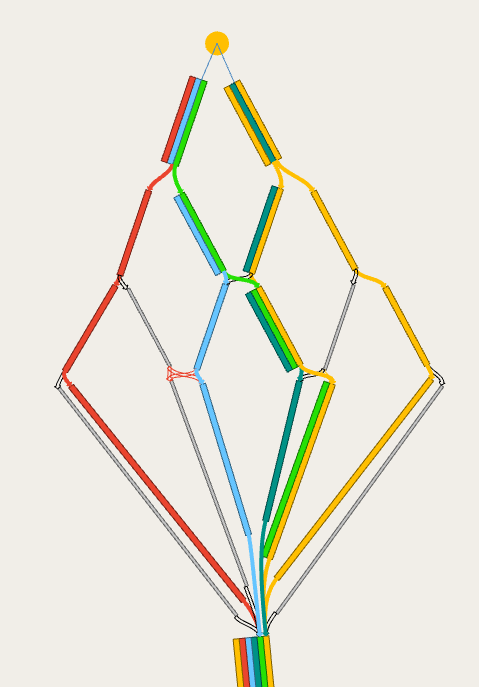 |
No próximo intervalo de custo, usando o DCF e os custos no final do intervalo anterior, calcule a árvore de caminho de menor custo. Quando houver várias conexões de entrada, a árvore fornecerá vários caminhos para o mesmo OD. Adicione tudo isso ao caminho definido. Com duas conexões de entrada, pode conter até oito caminhos. Como os dois novos caminhos da árvore de caminhos já existem no conjunto de caminhos, apenas 6 caminhos estão no conjunto de caminhos. Selecione no conjunto de caminhos os 3 caminhos com menor custo e calcule a probabilidade de escolha aplicando a função de escolha discreta. | |
No próximo intervalo de custo, usando o DCF e os custos no final do intervalo anterior, calcule a árvore de caminho de menor custo. Existem agora (até) quatro caminhos no caminho definido. Selecione no conjunto de caminhos os 3 caminhos com menor custo e calcule a probabilidade de escolha aplicando a função de escolha discreta. | |
Na próxima iteração, como atingimos o número máximo de caminhos, nenhuma nova árvore de caminho é calculada. O custo dos caminhos do conjunto é recalculado, utilizando o DCF e os custos ao final do mesmo intervalo na iteração anterior. Os veículos são divididos de acordo com o algoritmo MSA, WMSA ou baseado em gradiente. |
Atribuições estáticas
Em atribuições estáticas, a escolha das conexões de entrada e saída é controlada exclusivamente pelo cálculo do caminho, que é influenciado pelo VDF definido para a conexão. Se não for definido, usará o VDF padrão como custo, que é o tempo de viagem em minutos. Isso usa a velocidade da seção da seção de entrada e a distância do conector para fornecer um tempo de viagem de fluxo livre. Se você estiver usando um custo generalizado no restante do modelo, o VDF da conexão do centróide precisará ser alterado para que seja consistente. Isso pode ser alterado no menu centroide.
Observe que como um macro-meso híbrido é uma atribuição dinâmica, a escolha das conexões é controlada conforme descrito no capítulo anterior.
O que acontece quando você usa a atribuição de caminho de uma execução anterior?
Isso depende do tipo de experimento do arquivo de atribuição de caminho e do tipo de experimento para o qual está sendo usado.
- Atribuição estática com entrada de atribuição de caminho estático: a porcentagem dividida entre os caminhos e, portanto, os conectores é dada pela porcentagem atribuída a cada caminho no arquivo de atribuição de caminho para a primeira iteração. As iterações subsequentes alterarão as porcentagens e o caminho definido de acordo com o algoritmo de atribuição estática.
- Atribuição estática com entrada de atribuição de caminho dinâmico: você não pode executar uma atribuição estática com um arquivo de atribuição de caminho dinâmico.
- Atribuição dinâmica SRC com entrada de atribuição de caminho estático: os veículos que estão usando “atribuição de caminho” como fonte de caminhos seguirão os caminhos e as probabilidades de escolha no arquivo de caminho, o que significa que as porcentagens nas conexões ou usam a melhor entrada não têm efeito sobre eles (eles têm efeito apenas sobre os veículos que seguem um caminho fornecido pela escolha de rota estocástica). Observe que, se não houver viagem entre o par OD na corrida que gerou o arquivo de caminho, o veículo usará a escolha de rota estocástica.
- Atribuição dinâmica SRC com entrada de atribuição de caminho dinâmica: os veículos que estiverem utilizando “atribuição de caminho” como fonte de caminhos seguirão os caminhos e as probabilidades de escolha no arquivo de caminho, o que significa que serão afetados pelas porcentagens nas conexões ou use o melhor conjunto de entrada quando o arquivo de caminho foi gerado (os atualmente definidos têm efeito apenas em veículos seguindo um caminho fornecido pela escolha de rota estocástica). Observe que, se não houver viagem entre esse par OD na execução que gerou o arquivo de caminho, o veículo usará a escolha de rota estocástica (portanto, certifique-se de definir a mesma semente aleatória).
- Equilíbrio dinâmico do usuário com entrada de atribuição de caminho estático ou dinâmico: os veículos são primeiro divididos de acordo com as porcentagens de origem e/ou destino atualmente definidas (se houver), então o caminho inicial definido e as probabilidades de escolha são lidos do arquivo de caminho (com algumas modificações em caso de configurações inconsistentes: se vem de uma atribuição estática, ou de uma atribuição dinâmica sem porcentagens de conexão, e as conexões atualmente têm porcentagens, as probabilidades de escolha são rebalanceadas para 100% por conector; se vem de uma atribuição dinâmica com porcentagens de conexão, e as conexões atualmente não possuem porcentagens, os primeiros x caminhos para cada OD são tomados e suas probabilidades rebalanceadas para 100%).
Configurações de geometria:
Se um centróide estiver conectado a uma ou mais seções que não estão presentes na exibição ativa atual, a divisão de porcentagem pode não somar 100% para cada combinação de configurações de geometria. Existem várias opções para lidar com esta situação:
- Permita que o Aimsun Next defina a porcentagem dividida para todas as seções, definindo os conectores como padrão, as mesmas porcentagens para todos ou usando a melhor entrada.
- Se um centróide estiver conectado às seções 1,2,3 em uma configuração e 1,2,4 em outra, certifique-se de que as divisões para 3 e 4 sejam as mesmas.
- Edite as seções de conexão para garantir que haja uma única seção comum conectando-se ao centróide para todas as configurações de geometria.
- Divida o centroide em um centroide por conexão usando a ferramenta dividir centroide e altere as conexões na configuração da geometria.
- Duplique o centroide e edite a demanda e as divisões em diferentes matrizes para cada cópia do centroide. Crie novas Demandas de Tráfego para conter as matrizes editadas e selecione uma Demanda de Tráfego para o cenário que seja consistente com a Configuração de Geometria.




