
Nota Técnica #63
Por Martin Hartmann
Outubro de 2021
Intro
A automação de veículos atrai os interessados que procuram prever os impactos desta tecnologia no tráfego rodoviário. As diversas perspectivas das partes interessadas podem variar desde políticas de planejamento de tráfego de alto nível até aspectos operacionais para validação de sensores de percepção sob condições climáticas adversas. O Aimsun cobre todo o espectro do domínio oferecendo ferramentas e serviços de modelagem, desde modelos macroscópicos até complexas co-simulações em tempo real de Stacks VA com gêmeos digitais representando ambientes de tráfego realistas.
Neste artigo, explicamos e demonstramos o uso de simulação microscópica de veículos equipados com controle de cruzeiro cooperativo adaptativo (CACC) no Aimsun Next. Desde a versão 8.4, o Aimsun Next incluiu uma implementação nativa do algoritmo ACC e CACC (aqui rotulado como C/ACC) desenvolvido por Milanes & Shladover, 2014 [1]. Portanto, esta nota técnica define a implementação do controlador no contexto de um modelo de microsimulação, descreve o parâmetro revelado ao usuário e dá alguns exemplos práticos da utilização do controlador.
Principais pontos
Os veículos C/ACC apresentam um comportamento de acompanhamento de carro significativamente diferente dos veículos convencionais ( no Aimsun Next: Gipps-controlado), permitindo breves intervalos de tempo dentro dos pelotões de veículos conectados. Vamos resumir as informações mais importantes sobre o algoritmo C/ACC no contexto da microimulação no Aimsun Next:
- Os veículos podem ser equipados ou com ACC, CACC ou não equipados.
- O algoritmo C/ACC sobrepõe o comportamento longitudinal padrão (aceleração e velocidade do modelo Gipps de condução do carro).
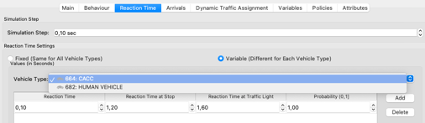
- O tempo de reação deve ser ajustado para 0,1s para veículos equipados com C/ACC, recomenda-se que os veículos convencionais mantenham seu próprio tempo de reação (cerca de 0,8s).
- Qualquer veículo equipado com CACC é capaz de ACC. Portanto, o veículo equipado com CACC seguindo um veículo sem CACC está usando “somente” o controlador ACC.
- Algoritmo adicional CAMP para evitar colisões mantém espaços seguros para a condução do veículo.
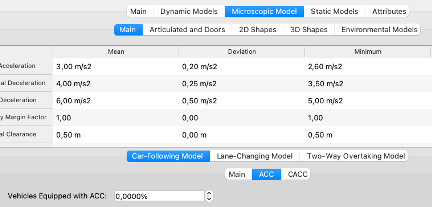
- A possibilidade de um veículo ativar o C/ACC e o tamanho máximo do pelotão podem ser definidos no tipo de via.

- O comportamento de pelotão resultante é afetado pela combinação da velocidade desejada dos veículos, tamanho máximo do pelotão e parâmetros do controlador C/ACC.
Descrição dos estados do controlador
A seguir, há cinco estados que se aplicam a um veículo equipado com CACC:
- CC Regulação de velocidade (“nenhum veículo precedente em sua faixa de detecção, escolha sua aceleração”)
- Regulação de gap do ACC (“siga um veículo precedente*, ajuste a aceleração para atender ao intervalo de tempo desejado”)
- Regulação de gap do líder do pelotão CACC (“tamanho máximo do pelotão atingido, você é o novo líder, escolha sua aceleração”)
- Regulação de gap do seguidor do pelotão CACC (“seguir o líder conectado, ajustar a aceleração para atender ao intervalo de tempo intra-pelotão desejado”)
- Desabilitado (“nenhum controlador equipado ou temporariamente desabilitado pelo algoritmo CAMP”)

* o veículo precedente pode ser um veículo não equipado, equipado com ACC ou CACC dentro do limite inferior de folga ACC ou Limiar Inferior de Gap CACC
Parâmetros do pelotão ACC
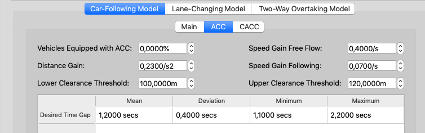
- Ganhos do controlador ACC: parâmetros de sensibilidade do controlador ACC tanto nos erros de posicionamento como de velocidade durante o fluxo livre e seguindo. Os valores são definidos para os valores padrão do papel [1] e foi encontrado para minimizar a diferença entre os resultados reais empíricos e simulados. Recomendamos à maioria dos usuários que assumam os valores padrão.
- Limite inferior de distância: os detectores a bordo do veículo objeto identificaram um líder; o veículo objeto entra no estado de regulamentação do ACC Gap e tenta alcançar o Desejado Time Gap.
- Limite superior de distância: o líder está além da faixa de detecção dos sensores a bordo; o veículo objeto deixa o pelotão e entra na regulação de velocidade CC
- Intervalo de tempo desejado (Desired Time Gap): a distância/intervalo temporal entre o veículo sujeito e o líder dentro do pelotão, o valor padrão é definido para a distribuição Nowakovski (1,2 / 0,4 / 1,1 / 2,2s) [3].
Parâmetros do Pelotão CACC
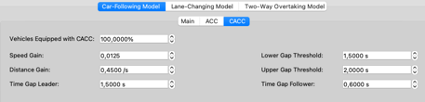
- Ganhos do controlador CACC: parâmetros de sensibilidade do controlador CACC ajustando o intervalo de tempo entre o veículo objeto e o líder.
- Intervalo de tempo atual > Limite Superior do Gap: o veículo sujeito muda para o estado de regulação do Gap ACC (por exemplo, o líder aumentou sua velocidade desejada e está além da faixa de conectividade).
- Intervalo de tempo atual < Limite inferior do Gap: o veículo objeto muda para o estado de regulação do Gap do Pelotão Seguidor CACC com o objetivo de seguir o Gap Seguidor de Tempo intra-pelotão (padrão 0,6s).
- A lacuna de tempo atual < Limite Superior da Lacuna e tamanho máximo do pelotão é atingido: o veículo objeto passa a ser um líder de seu próprio pelotão e entra no estado de Regulação de Lacuna de Líder de Pelotão CACC visando o Líder da Lacuna de Tempo (padrão 1,5s).
- Tempo de intervalo entre o limite de tempo inferior e superior: o veículo sujeito usará a regra de histerese e aplicará o estado de acompanhamento do carro a partir da etapa de tempo anterior.
Intervenção de emergência do CAMP
O modelo C/ACC no Aimsun Next emprega o algoritmo de aviso de colisão frontal CAMP [2]. Este algoritmo está incluído no modelo para verificar se a distância entre o veículo sujeito e o líder é suficiente para o acompanhamento seguro do carro. Se o algoritmo CAMP for ativado em qualquer ponto, o controlador C/ACC é desativado, seguido por um resfriamento de 20s antes de voltar a entrar no último estado C/ACC.
Exemplos de Simulação
- Veículo equipado com CACC (em vermelho) sem nenhum veículo anterior ® CC regulação de velocidade
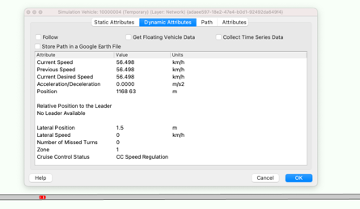
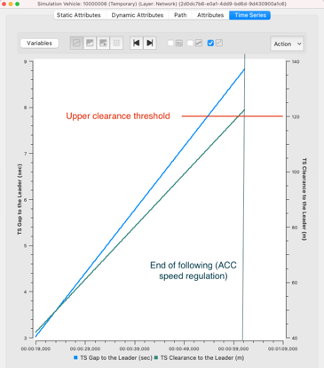
- Veículo equipado com CACC (vermelho, velocidade desejada = 49,9 km/h) segue um veículo não equipado (azul, velocidade desejada = 57 km/h) ® Regulação de velocidade ACC até a Distância > Limite superior de distância (120m) ® Regulação de velocidade CC
Diminua a velocidade de gravação e evidencie os valores de Distância e o Status do Cruise Control
Comentário: Você pode coletar séries temporais (TS) de veículos individuais de ambos os valores Gap para o líder (linha azul) e Clearance para o líder (linha verde) para visualizar o comportamento.
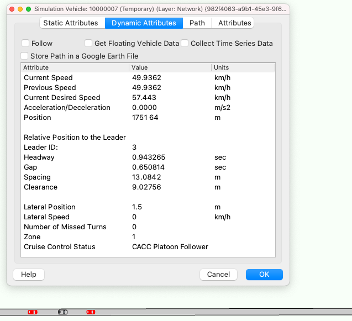
- O veículo equipado com CACC é conectado e faz parte do pelotão com o objetivo de estabelecer a diferença de tempo intra pelotão 0,6s > Regulação de gap do seguidor do pelotão CACC
- Veículo equipado com CACC sem líder (CC Speed regulation active) pouco antes de identificar um novo veículo anterior. Depois que a distância de segurança cai abaixo do Limiar Inferior de 100 m, o veículo objeto muda seu estado para a regulamentação do ACC Gap.
Diminuir a velocidade de gravação e destacar os valores de Distância e Status do Cruise Control
- Veículo equipado com CACC pouco antes de entrar no pelotão CACC: Intervalo de tempo atual para ir abaixo do Limiar Inferior de 0,5s aplicando o Regulamento de Intervalo ACC por enquanto (imagem à esquerda) e após entrar no pelotão CACC visando o Regulamento de Intervalo Follower ® CACC Platoon Follower Gap (imagem à direita).
Diminuir a velocidade de gravação e destacar os valores de Distância e Status do Cruise Control
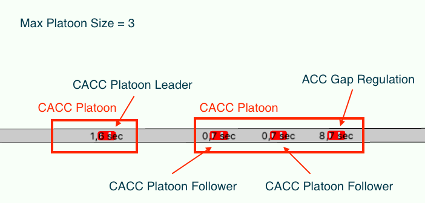
- A restrição do tamanho do pelotão força o veículo objeto a se tornar um novo líder de pelotão (pelotão CACC mais à esquerda). O líder do pelotão mais à direita está no estado de regulamentação do ACC Gap, pois os veículos anteriores estão mais próximos do Limiar Superior de 120 m. Após ultrapassar este limite, o líder entra no estado de regulação de velocidade CC.
Nota final
No modelo implementado, um verdadeiro líder de pelotão pode ser etiquetado com diferentes etiquetas CACC Control Status (mesmo com tamanho de pelotão = 1):
- Líder de pelotão CACC: se o tamanho máximo do pelotão forçar o veículo a criar um novo pelotão,
- ACC Gap Regulation: se o líder do pelotão estiver dentro do alcance do sensor para um veículo anterior,
- CC Speed Regulation: se o líder do pelotão estiver fora do alcance do sensor para um veículo anterior.
Referências
[1] Vicente Milanés, Steven E. Shladover. Modeling cooperative and autonomous adaptive cruise control dynamic responses using experimental data. Transportation research. Part C, Emerging technologies, Elsevier, 2014, pp.285-300. 10.1016/j.trc.2014.09.001 . hal-01091160
[2] Kiefer, R.J., Cassar, M.T., Flannagan, C.A., LeBlanc, D.J., Palmer, M.D., Deering, R.K., Shulman, M.A., 2003. Forward collision warning requirements project: refining the CAMP crash alert timing approach by examining” last-second” braking and lane change maneuvers under various kinematic conditions.NHTSA Research Report HS-809 574.
[3] Nowakowski, C., J. O’Connell, S.E. Shladover, and D. Cody, 2010, “Cooperative Adaptive Cruise Control: Driver Selection of Car-Following Gap Settings Less Than One Second”, 54th Annual Human Factors and Ergonomics Society Meeting, San Francisco, CA.




