Nota Técnica #27
Junho 2017
Por Dimitris Triantafyllos and Carles Illera
Você sabia que desde o Aimsun 8.2 você pode fazer uso de uma Função de Penalização de Movimento (TPF) que percebe os custos a partir de um plano de controle selecionado no cenário macro? Você já utilizou as Funções de Atraso de Junção (Junction Delay Functions – JDF) para modelar placas de pare/preferência durante uma atribuição estática? Abaixo você encontrará exemplos de funções TPF e JDF que podem ser utilizadas em:
- Interseções semaforizadas
Placas de pare/dê a preferência
Interseções semaforizadas
O Aimsun 8.2 introduz a capacidade do TPF de acessar as informações do plano de controle (tempo verde e duração do ciclo) de um movimento e de incluir este custo no cálculo do custo do link. Você encontrará um exemplo no modelo chamado ‘TPF – Exemplo de Interseção Semaforizada’. Esta função de custo calcula, em função do Volume Atribuído, o atraso médio de cada movimento semaforizado, com base no cálculo estatístico encontrado no Manual de Capacidade Rodoviária (HCM) 2010.
Exemplo de TPF:
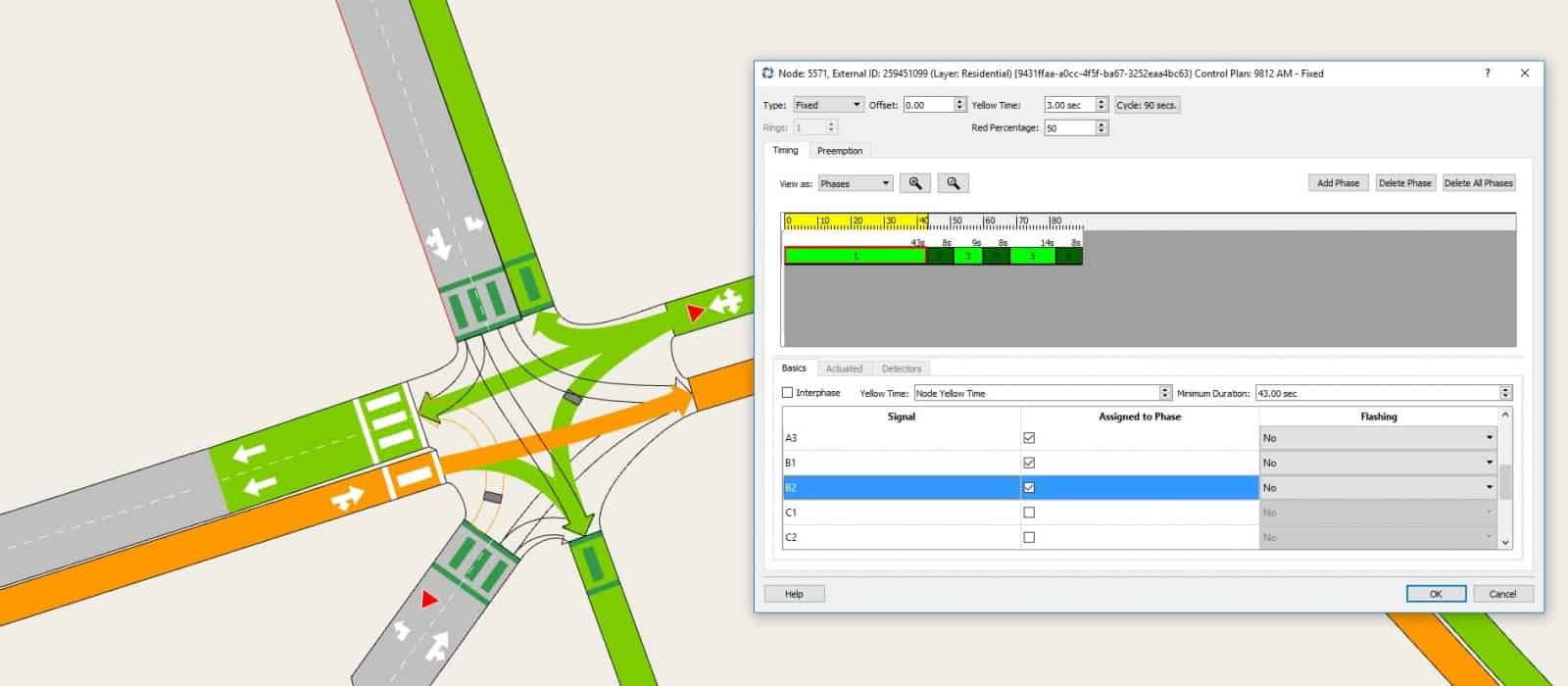
Considere o movimento com a cor laranja no cruzamento semaforizado a seguir. Este movimento recebe 43 segundos de tempo verde durante o ciclo de 90 segundos.

-
- Primeiro atribua o Plano de Controle desejado dentro do Cenário de Atribuição de Macro.

Figura 2. Definição do Plano Mestre do Controlador no Cenário de Atribuição Estática - Em seguida, atribuir o ‘TPF – Exemplo de Interseção Semaforizada’ ao movimento semaforizado, clicando duas vezes sobre o movimento. Veja a seguinte captura de tela:
Figura 3. Definição do TPF – Exemplo de Interseção Semaforizada - Após executar uma Atribuição Macro, você pode ver o custo final calculado com base no volume atribuído:
Figura 4. Custo de um movimento para uma atribuição macro
- Primeiro atribua o Plano de Controle desejado dentro do Cenário de Atribuição de Macro.



O Volume Atribuído desta vez saiu 339,62 PCUs, e o custo correspondente foi de 0,20 minutos.
Notas
– Clique duas vezes sobre o objeto TPF para verificar o código Python. Para traçar um gráfico que mostra como o valor do custo varia com o volume atribuído do movimento, selecione um Experimento de Atribuição Estática, um Tipo de Veículo e, em seguida, basta clicar sobre o movimento desejado.

Figura 5. Um gráfico que mostra como o custo varia com o volume atribuído para um movimento específico dentro do TPF codificado em Python.
– Se um Plano Mestre de Controle com vários Planos de Controle for selecionado, então o tempo verde médio e o tempo de ciclo serão calculados levando em conta os diferentes planos, cada um ponderado com sua duração relativa dentro do período coberto no cenário. – Se for atribuído um Plano de Controle Atuado, então o TPF tem acesso ao ciclo (considerado como fixo) e ao tempo verde mínimo e máximo definido para cada fase no plano de controle. Você é responsável por implementar no TPF uma função que calcula a duração verde a ser levada em conta no cálculo do atraso.
Sinalizações de Pare e Dê a Preferência
Quando uma placa de dê a preferência ou de pare é associada a um movimento, então outro tipo de função de custo, chamada Função de Atraso de Junção (Junction Delay Function – JDF), pode ser atribuída a este movimento para modelar o tempo de viagem ou o custo como uma função de volumes de movimentos conflitantes, o próprio volume de movimento ou o volume da seção de origem. Exemplo JDF: O modelo fornece um exemplo de tal JDF que pode ser aplicado com sinalizações de dê a preferência e pare chamados ‘JDF – Exemplo de Interseção Não Semaforizada’.

-
-
- Primeiro, esta função precisa ser atribuída a um movimento específico:
Figura 7. JDF – Exemplo de Interseção não semaforizada pode ser definido no movimento - Para aplicar esta função de custo a todas os movimentos com sinalizações de pare ou dê a preferência, use a ferramenta Exibição de Tabela para modificar um atributo de vários objetos do mesmo tipo. Basta selecionar todos os movimentos e usar o filtro para selecionar somente os movimentos com uma sinalização de dê a preferência ou de pare associada. Em seguida, atribua a função de atraso de junção a todos os movimentos filtrados.
Figura 8. Usando a Exibição de Tabela para realizar múltiplas mudanças no mesmo tipo de objeto - Finalmente, inicie um Experimento de Atribuição Macro para ver os seguintes resultados:
Figura 9. Custo dos movimentos para uma atribuição macro
- Primeiro, esta função precisa ser atribuída a um movimento específico:
-



Nota
Este JDF “Exemplo de Interseção Não Semaforizada” é um exemplo e só pode ser usado para movimentos com uma faixa dedicada.
Movimentos Semaforizados com Sinalizações de Dê a Preferência ou de Pare
Se um movimento em uma interseção semaforizada tiver conflitos com outros movimentos durante a fase verde (por exemplo, movimento à esquerda permitido), crie um novo JDF que capture os efeitos tanto do tempo do semáforo quanto do volume conflitante.