Technical Note #22
Janeiro 2017
Por Paolo Rinelli e Dimitris Triantafyllos
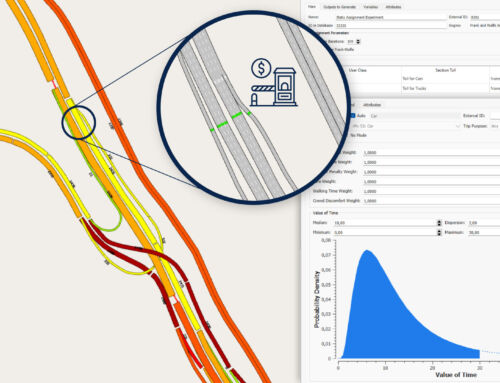
Você sabia que você pode usar simular o Controle Cooperativo Adaptativo de Cruzeiro (CACC) no Aimsun Next 20 ?
Para esta aplicação, o software possui funções para:
- Ler o estado de um veículo e o do veículo anterior (para verificar se os dois estão dentro da faixa máxima de comunicação do sistema e para ler as informações que seriam transmitidas entre os dois, tais como: posição, velocidade, aceleração, etc.)
- Modificar os parâmetros comportamentais de um veículo para emular a transição do controle humano para o controle de máquinas
- Controlar a velocidade de um veículo durante a simulação
Controle Cooperativo Adaptativo de Cruzeiro
O Controle de Cruzeiro Adaptativo Cooperativo depende da comunicação entre veículos para acessar a velocidade, distância e aceleração do(s) veículo(s) líder(es) para calcular a velocidade ou aceleração que o veículo seguinte deve adotar.

Representação esquemática de uma cadeia de veículos com comunicação V-V e sensores de objeto (fonte: TNO report, 2007-D-R0280/B, Design and evaluation of an Integrated Full-Range Speed Assistant, March 20th, 2007)
Um exemplo de lógica CACC (ver Bart van Arem et al., The Impact of Cooperative Adaptive Cruise Control on Traffic Flow Characteristics, 2006) é:
ad é a aceleração que o seguidor deve aplicar
a é a aceleração do líder
ev,i é o erro de velocidade, igual à velocidade relativa entre líder e seguidor
exi é o erro de folga, igual à diferença entre a folga desejada xd,i e a folga atual xr,i
k1, k2, k3 são ganhos do circuito de feedback do controlador para aceleração a, velocidade vx e erro de distância ex