Nota Técnica #33
Maio 2018
Por Laura Oriol
In the second part of this series on pushing mesoscopic calibration to the max, Laura Oriol examines how to alter parameters for throughput at traffic signals and at major-minor priority junctions. These tips aim to show you how to avoid switching unnecessarily from meso to micro, ultimately speeding up your workflow.
 and Jam Density (JD) on flow-density diagram")
Free-Flow Speed
Free-flow speed is the speed that occurs when density and flow are zero. In Aimsun Next, it depends on the maximum allowed speed of the section/turn, the speed acceptance of the vehicle, and the maximum speed of the vehicle. It is represented by the positive slope of the triangular density-flow diagram.
Reaction Time
Reaction Time affects the maximum throughput and the queue propagation speed (the negative slope of the triangular density-flow diagram). In free-flow conditions and without lane-changing, the value that ensures consistency of headway, and therefore throughput, between micro and meso is RTmeso = 1.5 · RTmicro. We can observe in Figure 1 how throughput is reduced by increasing reaction times.
Jam Density
Jam Density refers to the maximum traffic density that can be observed in the section (when vehicles are stationary). It corresponds to the red dot on the diagram in Figure 1. In the car-following formula the jam density parameter of the section is not used; what is used instead is the effective length of the vehicle, which is the sum of the length and the clearance of the vehicle, the reciprocal of which can be interpreted as a jam density.
In Aimsun Next the jam density parameter of the section is only used in queue spillback situations: to determine whether a lane is full, and to calculate how long after the first vehicle leaves a full queue another vehicle can join the back of the queue. In Figure 1 you can see how reducing the Jam Density (i.e. increasing the effective length of the vehicles) has low impact on the throughput, although it affects significantly the queue propagation speed.
Throughput at Traffic Signals
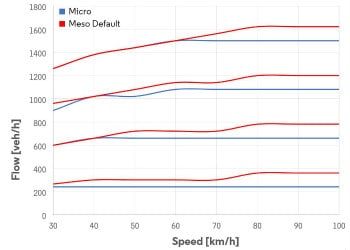
In mesoscopic simulation, vehicles are either stopped or travelling at their desired speed as there is no acceleration or deceleration in the car following model, unlike in the microscopic simulation. This simplification must be considered taken into account in all situations where acceleration and deceleration play an important role. It is the case at traffic signs or traffic lights, where the lack of acceleration and deceleration may yield to an overestimation of the flow unless it is compensated with the calibration of other parameters. At signalizsed intersections, it possible to use the Reaction Time at Traffic Light (RTTL) parameter to produce in meso a throughput that is more consistent with micro. This parameter sets the time it takes foris used to increase the reaction time of the first vehicle stopped at the traffic light to react to the traffic light changingwhen it switches to green. Therefore, it can be used to compensate for the lack of acceleration. If we use the default Reaction Time at Traffic Light, 1.6s, the mesoscopic simulation is too optimistic as it achieves higher flows. Note in Figure 2 , for the particular case of 1h simulation and a traffic light cycle of 60 seconds, that this difference becomes clearer the higher the speeds and the shorter the green times are.


Throughput at Major-Minor Priority Junctions
In major-minor priority junctions traffic on the minor road gives way to traffic on the major road. It is the most common form of junction control and it is normally controlled by give way or stop signs. As mentioned earlier, this is another situation that requires careful calibration in order to obtain consistent results between mesoscopic and microscopic simulation, because acceleration and deceleration play an important role. This applies to a simple T-junction controlled by a give way or a stop sign, as in Figure 4.