Nota Técnica #32
Abril de 2018
Por Laura Oriol
Alguns modelos abrangem sistemas grandes e complexos que podem exigir diferentes níveis de simulação. Subáreas menores normalmente requerem abordagens detalhadas, como a simulação microscópica, enquanto é muito mais rápido usar modelos simplificados, como a simulação mesoscópica, para representar áreas mais amplas.
Como modelos microscópicos e mesoscópicos nunca produzirão exatamente os mesmos resultados, é importante obter uma boa correspondência de comportamento sempre que possível. Considerando que uma abordagem de microssimulação tende a fornecer resultados mais precisos, em algumas circunstâncias é necessário calibrar os parâmetros meso padrão para alcançar resultados análogos em ambos os modelos.
As diretrizes a seguir buscam mostrar como, em meso, os parâmetros existentes podem ser alterados para aproximar o comportamento do modelo microscópico em situações específicas.
Mudança de faixa em áreas de entrelaçamento
Áreas ou seções de entrelaçamento (Figura 1) envolvem o cruzamento, em uma curta distância, de tráfego de entrada e saída que viaja no mesmo sentido.

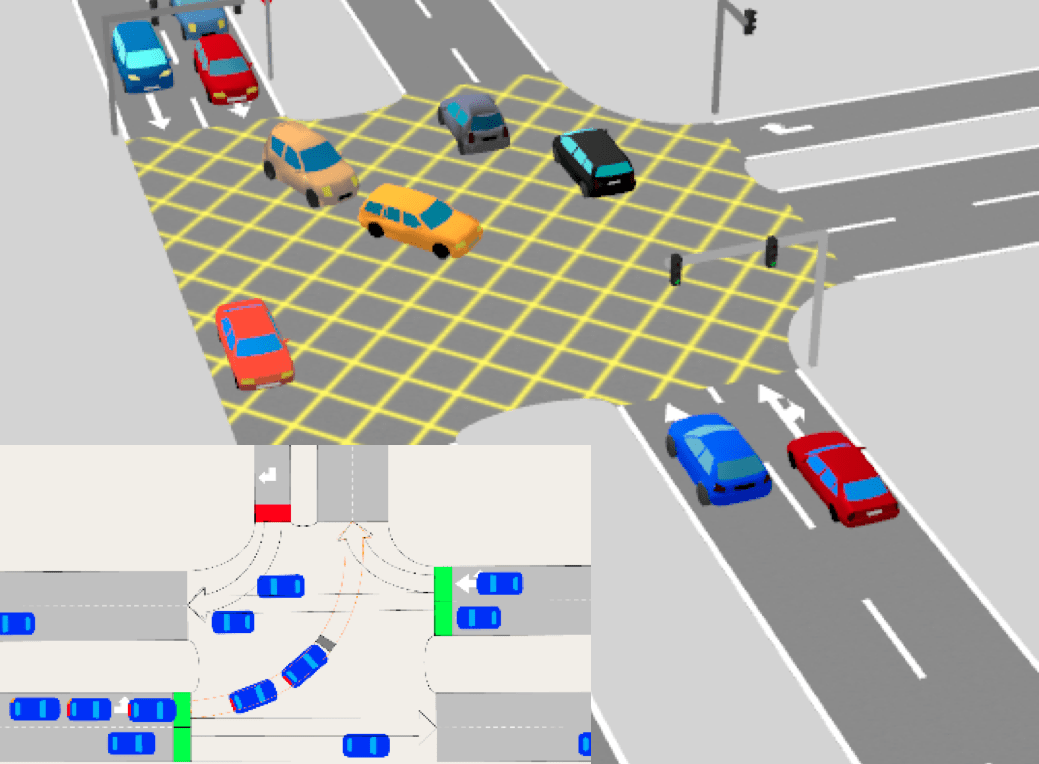
Capacidade de armazenamento em interseções
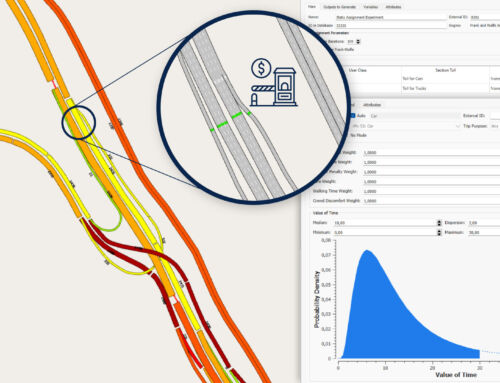
Em certos casos, pode ser necessário implementar linhas de retenção nas conversões para aumentar sua capacidade ou reproduzir o comportamento real dos motoristas. Esse é o caso da interseção a seguir (Figura 3), na qual os veículos podem virar à esquerda, mas precisam dar preferência aos veículos da via principal.

Exemplo
Considerando a interseção anterior e o seguinte plano de controle:



– Tempo verde total = tempo verde + percentual de vermelho · tempo amarelo = 40 s + 0,5 · 3 s = 41,5 s
– Tempo verde total / número de veículos = 41,5 s / 2 veículos = 20,75 s/veículo
Cada veículo tem 20,75 s para realizar a conversão. A ideia geral é definir um Final Safety Margin muito baixo (veja a Figura 6) para garantir que o veículo passe, e um Give Way Time Factor correspondente ao tempo máximo desejado de espera do veículo (20,75 s). O Initial Safety Margin padrão é de 10 segundos; portanto, neste exemplo, o Give Way Time Factor deve ser definido como 2,1 (20,75 s / 10 s = 2,1).
Seguindo esse procedimento, você deve alcançar os fluxos de conversão desejados (Figura 7).