Nota Técnica #30
Fevereiro 2018
Por Geline Canayon e Laura Torres
Uma simulação híbrida aplica simultaneamente o modelo microscópico em áreas selecionadas e o modelo mesoscópico no restante da rede. O modelo híbrido é recomendado para redes de larga escala com áreas específicas que requerem um nível microscópico de detalhe, mas com uma avaliação global da rede.
O uso do modelo híbrido é benéfico para redes onde mudanças ou estratégias que exigem um conhecimento preciso de quando um veículo passa por cima de um detector localizado dentro de uma seção de via (como controle adaptável e prioridade de sinal de trânsito (TSP)), mas podem ter uma influência mais ampla em termos de redirecionamento na rede. A execução de toda a rede em nível microscópico aumentaria o tempo de computação, de modo que o uso do modelo mesoscópico fora das áreas onde o micro é estritamente necessário permite aumentar o tamanho do modelo sem impactar muito no tempo de execução.
Exemplo: simulação híbrida com TSP
Por exemplo, a Figura 1 mostra uma rede que está no modelo mesoscópico com uma área de microssimulação onde o TSP é implementado (polígono verde). O TSP requer a detecção de ônibus à medida que eles se aproximam e saem dos cruzamentos para colocar e limpar as chamadas prioritárias. A Meso não sabe exatamente quando um ônibus passa por um determinado local dentro de uma seção, portanto o corredor do TSP precisa estar no modelo microscópico para que a lógica seja fornecida com entradas precisas. Ao mesmo tempo, a simples simulação do corredor ignoraria qualquer efeito de redirecionamento para veículos particulares, cujo tempo de viagem seria impactado pelas chamadas em trânsito.

Calibração
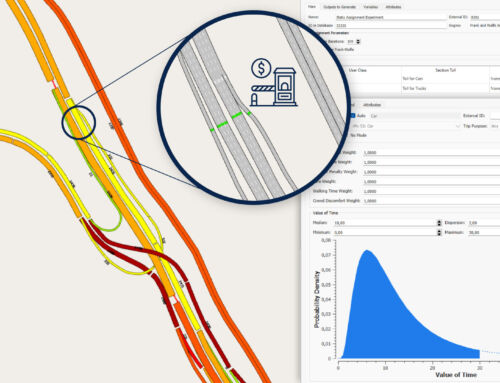
Ao utilizar o modelo híbrido, o primeiro passo seria calibrar o modelo inteiro a nível mesoscópico. Comece executando um experimento de Equilíbrio Dinâmico de Usuário e salve os caminhos em um arquivo de atribuição de caminhos. Segundo, definir as áreas de microsimulação sob o escopo de microsimulação do experimento híbrido, o que pode ser feito de duas maneiras: selecionando uma ou várias condições pré-definidas, ou desenhando polígonos e convertendo-os em áreas de microsimulação (Figura 2). Em terceiro lugar, executar uma simulação híbrida de one-shot usando a atribuição do caminho previamente salvo do meso DUE e calibrar o micro comportamento dentro das áreas de microsimulação.

Fronteiras do polígono
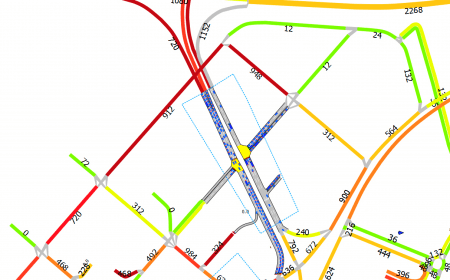
Ao desenhar um polígono para criar uma área de microssimulação, tenha em mente que quando um movimento estiver dentro dos limites de uma área de microssimulação, o nó inteiro e todas as suas aproimações também estarão em microssimulação. Como visto na Figura 3, há tráfego visível na direção nordeste porque tanto este nó quanto o downstream estão dentro da área de microssimulação. Entretanto, o tráfego sudeste só é visível na seção que entra no cruzamento, mas não na seção de saída porque o nó a jusante está fora do limite da área de microssimulação.
Quando uma área de microssimulação é criada, uma camada será automaticamente criada e todas as outras áreas de microssimulação geradas serão colocadas nessa camada. Por padrão, ela não será editável, portanto, se a área tiver que ser modificada, marque a caixa “Allow Object Editing” (Permitir edição de objetos) para a camada. Os limites da área de microssimulação podem ser modificados a qualquer momento. É uma boa idéia tornar a camada não editável novamente após fazer modificações na área de microssimulação.

Modelo Car-following:
RTmeso = 1,5 RTmicro
Por exemplo, se RTmicro=0,8 (normalmente entre 0,65 e 0,9 segundos), então RTmeso=1,5 * 0.8 = 1,2
RT Stopmeso = RT Stopmicro
RT TrafficLightmeso = RT TrafficLightmicro
JamDensitymeso = 1000/ (Length+MinDistVeh)
Modelo de Mudança de Faixas:
Distâncias de antecipação = Zonas de Distância
RT factormeso tem que ser reduzido para reduzir o atraso na mudança de faixa onde for necessário, por exemplo, onde você tenha aumentado Cooperationmicro
Além disso, tenha em mente que algumas informações não são propagadas através de fronteiras, tais como visibilidade de paradas de transporte público, distância de cooperação em rampas de acesso e visibilidade do fluxo principal em sinalizações de dê preferência (Figuras 4, 5 e 6, respectivamente).