Nota Técnica #26
Maio de 2017
Por Dimitris Triantafyllos e Sergi Pujadas
Os simuladores baseados em veículos da Aimsun oferecem diversas estratégias de gerenciamento de tráfego que permitem aos usuários modificar as condições da rede de tráfego, afetar o comportamento do motorista ou simular eventos na rede de tráfego.
As estratégias de gerenciamento de tráfego também podem ser usadas para modelar o congestionamento de tráfego sob condições de tráfego recorrente ou não-recorrente. Esta nota técnica explica como aliviar o congestionamento de tráfego usando as seguintes ações de tráfego:
A. Desativação da faixa reservada
B. Mudança do Plano de Controle
C. Mudança de velocidade
D. Ativar/desativar ações de tráfego com base em dados de detecção usando Gatilhos
E. Ativação do modelo de cooperação em movimentos
Background
A. Desativação da faixa reservada
Esta ação desativa a definição de uma faixa reservada, tornando-a acessível a todos os tipos de veículos. Os parâmetros a serem definidos são:
- A seção onde a faixa reservada deve ser desativada
- Que faixa(s) reservada(s) na seção será(ão) desativada(s)
- A gama de segmentos para desativar
B. Mudança do Plano de Controle
Esta ação altera o plano de controle padrão definido no cenário para aquele que você definir no editor de ação.
C. Mudança de velocidade
Esta ação altera a Velocidade Máxima da seção. Isto poderia ser implementado por faixa.
D. Gatilhos
Um gatilho é uma expressão que avalia como verdadeiro ou falso. A expressão é um conjunto de condições baseadas no estado atual de uma seleção de atributos estatísticos de elementos da rede (seções e/ou detectores). Estes atributos são avaliados toda vez que o Aimsun coleta estatísticas (para seções) ou no intervalo de detecção (para detectores, quando os dados são agregados) durante uma simulação. Para maiores informações sobre isto, consulte o Manual do Usuário do Aimsun.
E. Ativação do modelo de cooperação em Movimentos
Esta ação modifica as prioridades dos movimentos selecionados. O modelo de cooperação pode ser ativado com base no movimento e no tipo de veículo. Quando aplicados, os veículos com prioridade no movimento cooperarão com o tipo de veículo selecionado, enquanto que em circunstâncias normais esses veículos selecionados teriam que ceder. O valor da cooperação depende da % de cooperação da seção de destino do movimento de prioridade. Isto é definido no Editor de Seção. Uma cooperação de 100% irá desencadear um comportamento de zíper em situações de congestionamento. Uma cooperação de 0% restaura o comportamento normal de preferência
Implementação
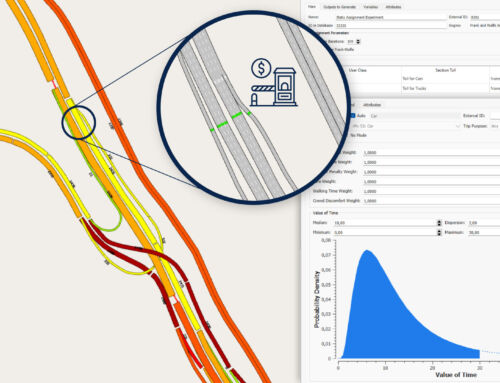
Nosso exemplo inclui uma rodovia com pedágio de 8 faixas.
-
- As 4 faixas centrais permitem a passagem de todos os veículos. Para essas faixas, há uma barreira e os carros precisam parar e pagar a taxa.
As duas faixas mais à direita abrirão somente quando as seguintes condições forem cumpridas: a) a fila na linha principal atinge o detector de ativação (ocupação > 50%) e, b) a velocidade desce para 10 km/h. Para essas faixas, há uma barreira e os carros precisam parar e pagar a taxa.
As duas faixas mais à esquerda permitem apenas a passagem de veículos equipados com e-pass. Para essas faixas, não há barreira e os veículos precisam reduzir sua velocidade para 30 km/h para passarem com segurança. A condição de mudança de velocidade do tráfego será aplicada desde o início da simulação até o final.
- As 4 faixas centrais permitem a passagem de todos os veículos. Para essas faixas, há uma barreira e os carros precisam parar e pagar a taxa.

Rodovia com pedágio de 8 faixas
Primeiro, crie a Desativação da faixa reservada, a Mudança do Plano de Controle e as condições de tráfego da Mudança de Velocidade, clicando com o botão direito do mouse no objeto de Gerenciamento de Tráfego, criando uma estratégia e depois três políticas diferentes, conforme apresentado na captura de tela abaixo:

Criar condições de desativação de faixa reservada, mudança de plano de controle e mudança de velocidade do tráfego
Em segundo lugar, criar os gatilhos para ativar e desativar essas ações de tráfego. Neste exemplo, utilizaremos intervalos de detecção de valores estatísticos como velocidade e ocupação. Para criar esses gatilhos, siga o processo apresentado nas telas abaixo:


Criar os gatilhos para ativar e desativar estas ações de tráfego
Aqui está o progresso da simulação passo a passo:
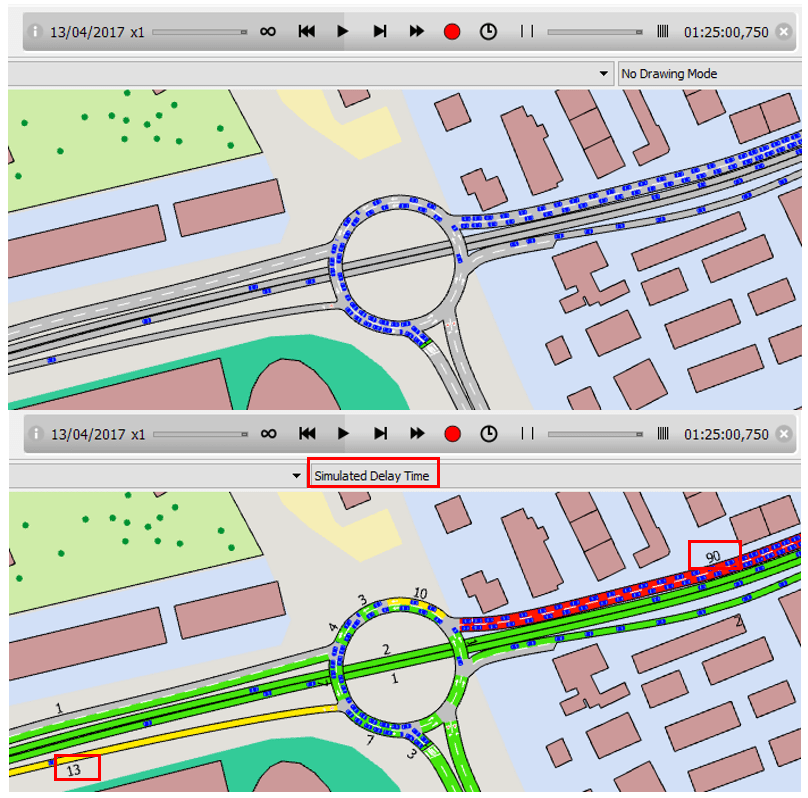
A simulação começa. Uma vez que a fila chegar ao Detector de Ativação (ocupação > 50% e velocidade < 10km/h), as condições de tráfego serão ativadas. Isto significa que as duas faixas mais à direita serão abertas para todos os veículos e o novo plano de controle será aplicado para atender ao tráfego de forma mais eficiente, aumentando a capacidade total do trecho. A ativação das ações de tráfego será anotada no registro Aimsun.


A fila chega ao Detector de Ativação e ativa as Condições de Trânsito
As duas faixas mais à direita foram abertas para servir carros normais. Um novo plano de controle é aplicado:

Quando a fila sair do detector de desativação, então as duas faixas mais à direita se fecharão novamente.

Entretanto, a Ação de Mudança do Plano de Controle continuará ativa até que a fila nessas faixas desapareça completamente (ocupação = 0 e velocidade > 10km/h):

Todas as mudanças serão mostradas no registro Aimsun.

Finalmente, aqui está um exemplo da Ativação do Modelo de Cooperação de Movimentos.

O primeiro passo é definir o nó e o movimento não prioritário desejado, assim como a classe do veículo que será afetada por esta ação de tráfego.

Neste exemplo, colocaremos a mudança de faixa – Cooperação a 100% para a seção de destino.

As imagens abaixo mostram a diferença entre as condições quando a ação de trânsito é ativada ou desativada.
A. Antes de ativar a condição de tráfego:

B. Após a ativação do gerenciamento de tráfego: