Junho de 2022 — Nota Técnica #70

Mohammad Saifuzzaman
Especialista em Produto

O modelo mesoscópico do Aimsun Next oferece uma simulação de link e de veículos individuais baseados em faixa com um compartamento simplificado comparado ao usado na microssimulação. Estas simplificações o tornam suficientemente bom para representar as interações do motorista na condução do carro, na mudança de faixa e na busca de brechas, ao mesmo tempo em que reduzem os cálculos e, assim, reduzem o tempo de execução em comparação com sua contraparte microscópica mais detalhada.
O modelo mesoscópico do Aimsun Next provou produzir tempos de viagem realistas em redes urbanas e na maioria das situações de rodovias. No entanto, quando se trata do comportamento de Merging em rampas, a falta de comportamento cooperativo às vezes representa um desafio na calibração do congestionamento produzido nesse tipo de gargalo. Reconhecemos essa limitação e inserimos no Aimsun Next 20 um modelo mesoscópico específico de comportamento de merging controlado por dois parâmetros adicionais: gap de cooperação e gap de merging. Esta nota técnica visa explicar como estes parâmetros podem ser usados para controlar o comportamento de merging e para calibrar o fluxo de tráfego observado e o congestionamento.
Contexto
Reproduzir o congestionamento exato em um local de merging em uma faixa lateral é sempre um desafio. Depende da geometria da via, e é altamente impactada pelo comportamento do motorista; por exemplo, na mesma situação você pode ter uma divisão muito diferente do congestionamento entre a pista principal e a rampa, dependendo do grau de cooperação.
A versão microscópica do Aimsun Next tem vários parâmetros para calibrar o comportamento de merging de faixas laterais (por exemplo, cooperação, agressividade, distância de cooperação, distância de merging, e opções de merging simultaneamente). Após uma análise detalhada dos dados reais em várias áreas de merging de faixas laterais, projetamos um novo modelo de merging para a simulação mesoscópica. Ele é controlado por dois parâmetros, a distância de cooperação e a distância de merging.
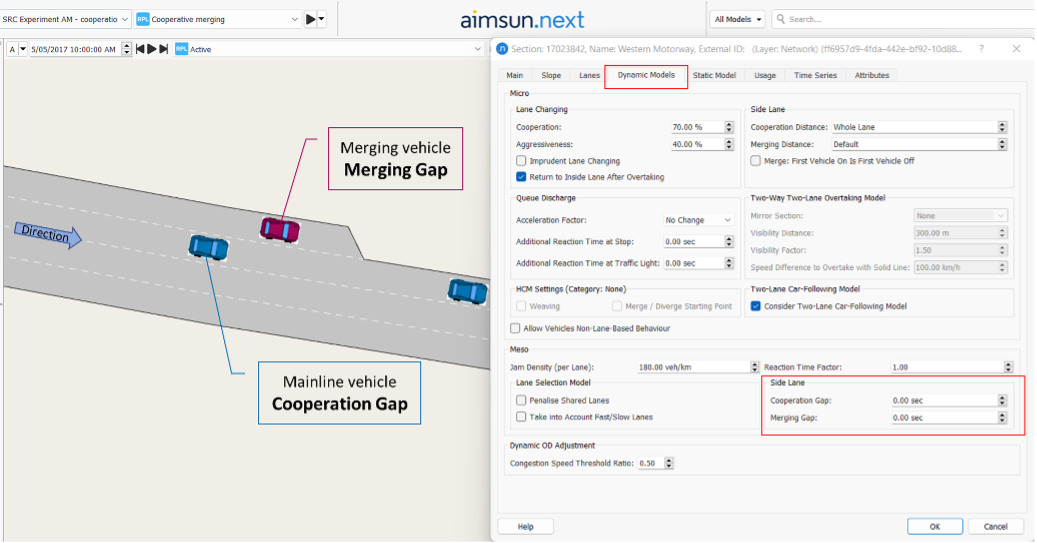
Gap de Cooperação: É o headway (em segundos) que os veículos da via principal serão forçados a ter ao sair da seção sempre que os veículos em merging estiverem presentes na rampa. Isto é para facilitar a incorporação do tráfego. Assim, um maior grau de cooperação do tráfego da via principal pode ser alcançado através do aumento do valor deste parâmetro. O padrão é de 0,0 s e significa nenhuma cooperação, o que é o mesmo das versões anteriores. Somente os veículos na primeira faixa da via principal adjacente à via lateral serão atrasados. Quando a brecha de cooperação aumentar, o fluxo de merging da via lateral deverá aumentar à custa de mais congestionamento na via adjacente na via principal.
Gap de Merging: É a brecha mínima que os veículos na faixa lateral (na rampa) procuram para se fundir na via principal. Quando a brecha de merging aumenta, a probabilidade de fluxo de merging a partir da via lateral diminui.
Estes dois parâmetros podem ser encontrados em uma seção de merging sob a aba “Modelos Dinâmicos”, como destacado na Figura 1 abaixo. Ambos oferecem atrasos adicionais ao veículo para prosseguir para a próxima seção a jusante. Com uma abordagem de tentativa e erro, estes dois parâmetros podem efetivamente ajudar a imitar o comportamento de merging lateral em qualquer circunstância. Como o modelo mesoscópico não oferece uma visualização 2D do comportamento individual do motorista, a prioridade deve ser dada para calibrar o fluxo (e a velocidade) em ambos os trechos de via principal e lateral.
Na próxima seção, foi realizado um teste de sensibilidade em pequena escala para os dois parâmetros em um modelo de teste.
Modelo de Testes
Um modelo simples de comportamento de merging foi preparado a partir de uma rede da rodovia M4 de Sydney. O local de teste tem dados históricos do fluxo de tráfego na pista lateral e na via principal. Portanto, o modelo nos permitiria verificar o impacto de diferentes valores de parâmetros e comparar estes com o valor padrão e com os dados de tráfego observados. As seguintes opções serão testadas:
- Valores padrão para os parâmetros
- Impacto do gap de cooperação
- Impacto do gap de merging
- Um conjunto de valores que resulta no fluxo simulado bater com os dados de fluxo observados.
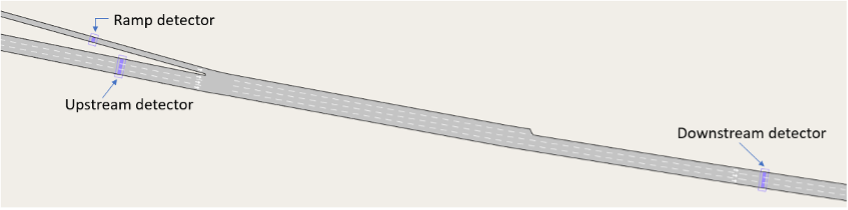
A área de merging na rodovia M4 em direção à leste é mostrada na figura abaixo. Um conjunto de dados do período de pico da manhã (6-10 da manhã) de um dia foi coletado. A rodovia transporta um alto tráfego urbano durante o período de pico da manhã.
Parâmetros padrão
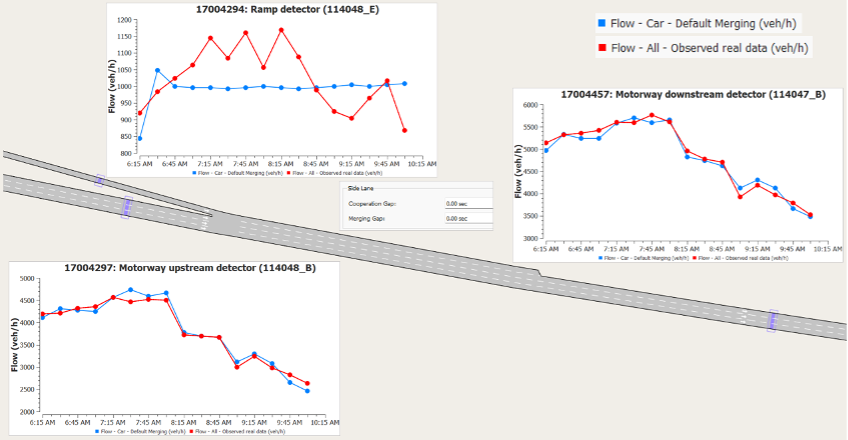
O modelo com comportamento padrão de merging do Aimsun Next não permitiu que o fluxo da rampa se fundisse livremente. A Figura 3 abaixo mostra que o fluxo na via principal, tanto a montante como a jusante, coincide perfeitamente. Entretanto, o fluxo da rampa é limitado a cerca de 1000 veíc/h. Os parâmetros padrão de merging no modelo mesoscópico geralmente dão prioridade ao tráfego da via principal, o que diminuiria o fluxo de merging das rampas, conforme observado na figura abaixo.
Impacto do gap de cooperação
O gap de cooperação criaria um atraso adicional para o tráfego na primeira faixa principal adjacente à faixa lateral. Representaria uma situação em que os veículos na via principal cooperariam para criar uma brecha para os veículos em merging. Quando a brecha de cooperação aumenta, é provável que o fluxo do merging da via lateral aumente. Na figura abaixo foram testados diferentes valores do gap de cooperação.
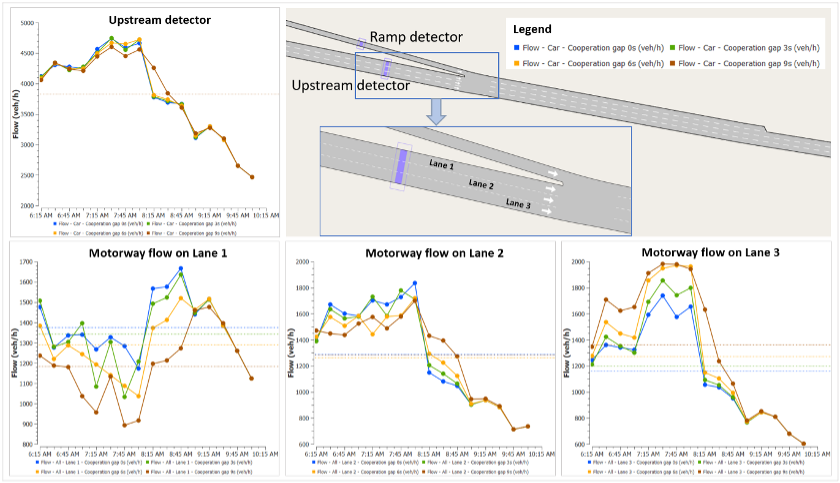
Observa-se na Figura 4 que o fluxo médio durante o período de 4 horas no detector da via principal a montante não mudou ao aumentar o gap de cooperação de 0 para 9s. Entretanto, um alto valor de cooperação parece reduzir o pico de fluxo no detector a montante. Para entender melhor o comportamento do motorista do tráfego da via principal com maior intervalo de cooperação, os gráficos simulados de fluxo de tráfego para cada faixa também são apresentados na Figura 4 acima.
É evidente que o fluxo na faixa 1 (a faixa mais próxima da rampa, ou seja, a faixa mais impactada pelo merging do tráfego) foi significativamente reduzido com o aumento do gap de cooperação. Pelo contrário, o fluxo na faixa 3 tem aumentado com o aumento do gap de cooperação. Portanto, uma clara mudança no uso da faixa foi observada neste teste onde uma proporção do tráfego da faixa 1 foi deslocada para a faixa mais distante da rampa para evitar o atraso causado pelo merging do tráfego. O resultado do teste sugere que com o aumento do gap de cooperação poderia ocorrer uma mudança de tráfego da faixa 1 (a faixa adjacente para a faixa lateral) para outras faixas disponíveis. Quando as outras faixas não têm a capacidade de aguentar esse tráfego adicional, ocorreria congestionamento e se propagaria a montante.
Impacto do gap de merging
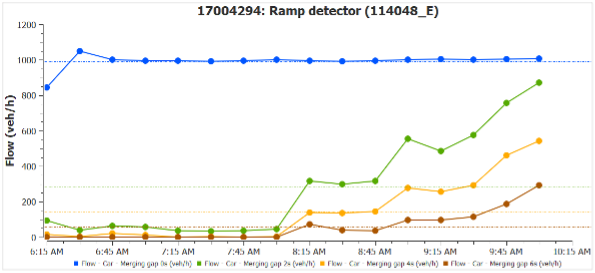
Com o aumento do valor do gap de merging, os veículos na faixa lateral provavelmente esperarão mais tempo para se fundirem com o tráfego da via principal. Quando o volume de tráfego da via principal está próximo da capacidade, um ligeiro aumento no gap de merging poderia causar uma redução significativa no fluxo do merging. Neste exemplo, foi testado um valor de 2s, 4s e 6s de intervalo de merging. A figura a seguir mostra o perfil do fluxo do tráfego na faixa lateral para diferentes valores de merging. A figura mostra que com um ligeiro aumento no valor do gap de merging, o fluxo de tráfego na rampa cai significativamente.
Calibração para o fluxo de tráfego observado
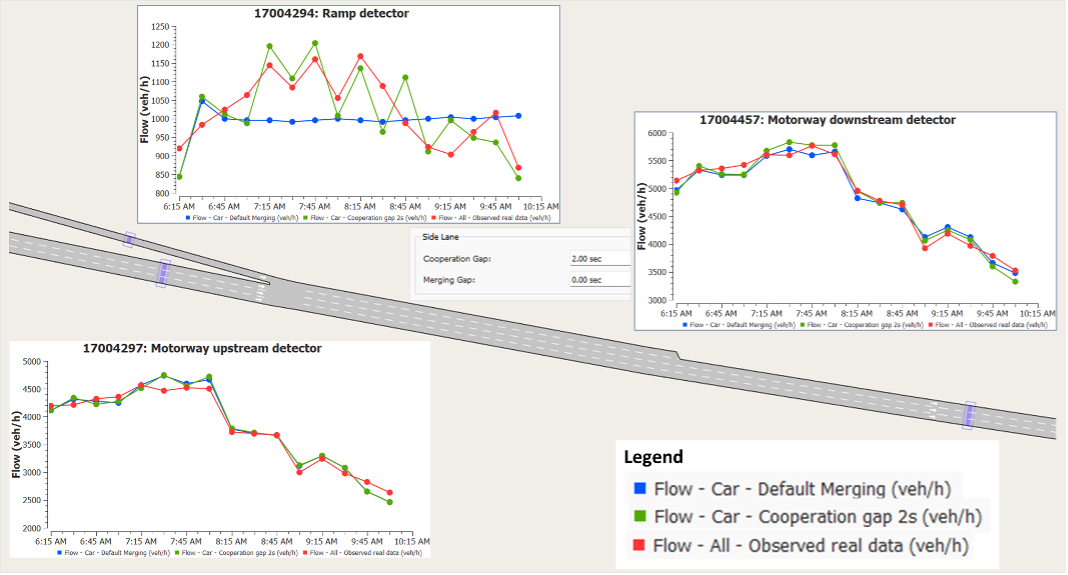
Após alguma tentativa e erro com os parâmetros de merging, um gap de cooperação de 2s e 0,0s de merging foram considerados suficientes para combinar o comportamento de merging simulado com o fluxo observado tanto na rampa quanto nos detectores da via principal. Isto permitiu que os veículos da via lateral se fundissem facilmente com o tráfego da via principal sem reduzir o pico do fluxo no detector a montante.
A figura a seguir mostra o perfil de fluxo simulado e observado nos detectores de rampa e os dois detectores da via principal. Com o gap de cooperação 2s, o tráfego na via principal cooperou, criando gaps para o movimento de fusão. Como resultado, os veículos da via lateral foram capazes de se fundir livremente, o que aumentou o fluxo na rampa, como mostrado na figura.
Considerações finais
Antes de calibrar os parâmetros de merging da via lateral, você deve ter certeza de que a demanda tanto na via principal quanto na rampa está correta.
Um modelo de tráfego contém muitas áreas de merging, mas nem todas elas exigem uma calibração local. Um valor comum para estes parâmetros deve ser primeiramente definido no nível do tipo de via. Qualquer mudança local deve ser introduzida somente onde for encontrado um desajuste com o fluxo de tráfego observado, ou o tráfego em merging estiver causando um congestionamento inesperado.
Ao calibrar um modelo mesoscópico, você deve se concentrar em combinar o fluxo (e a velocidade) de toda a seção, em vez dos valores para as faixas individuais.